Publications
2024
-
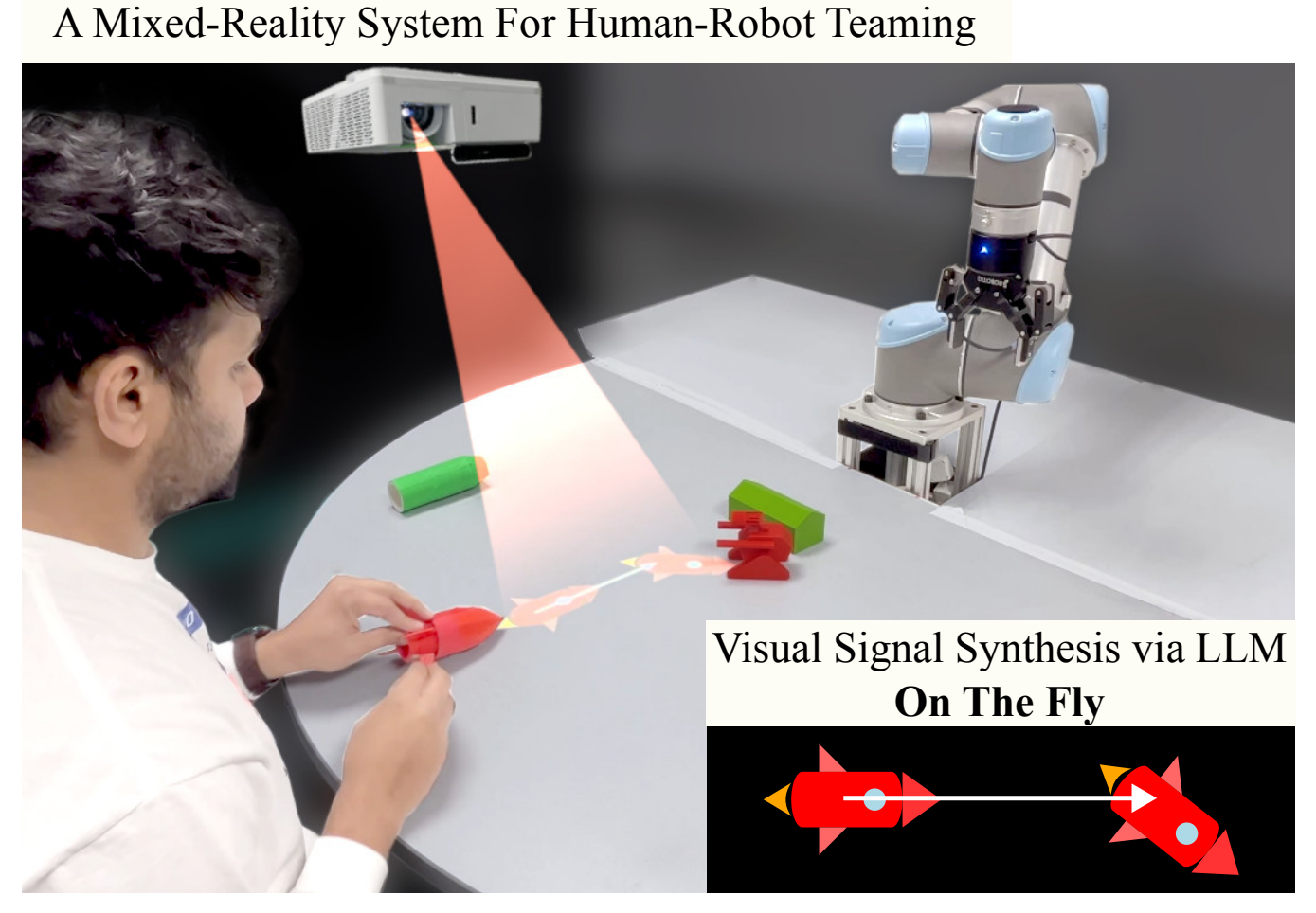 SiSCo: Signal Synthesis for Effective Human-Robot Communication via Large Language Models2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
SiSCo: Signal Synthesis for Effective Human-Robot Communication via Large Language Models2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024 -
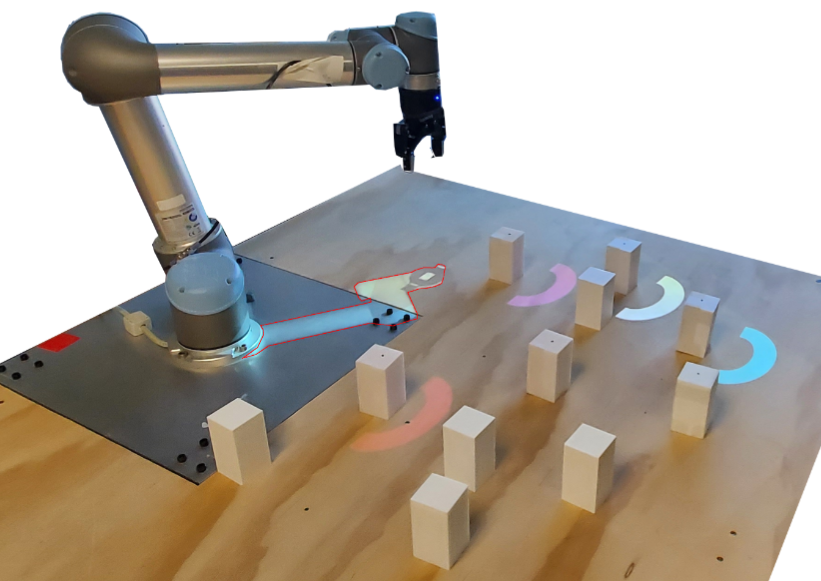
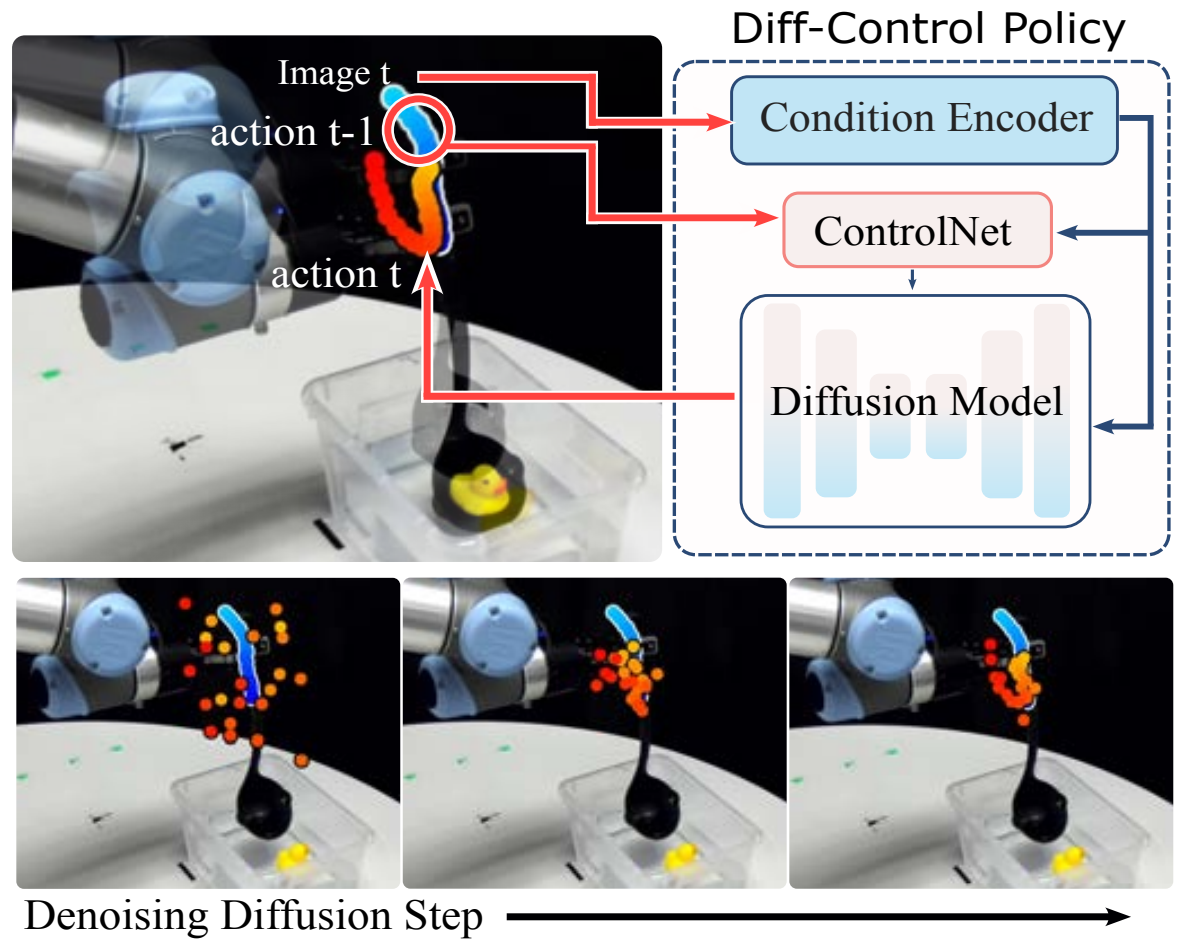 Diff-Control: A Stateful Diffusion-based Policy for Imitation Learning2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
Diff-Control: A Stateful Diffusion-based Policy for Imitation Learning2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024 -
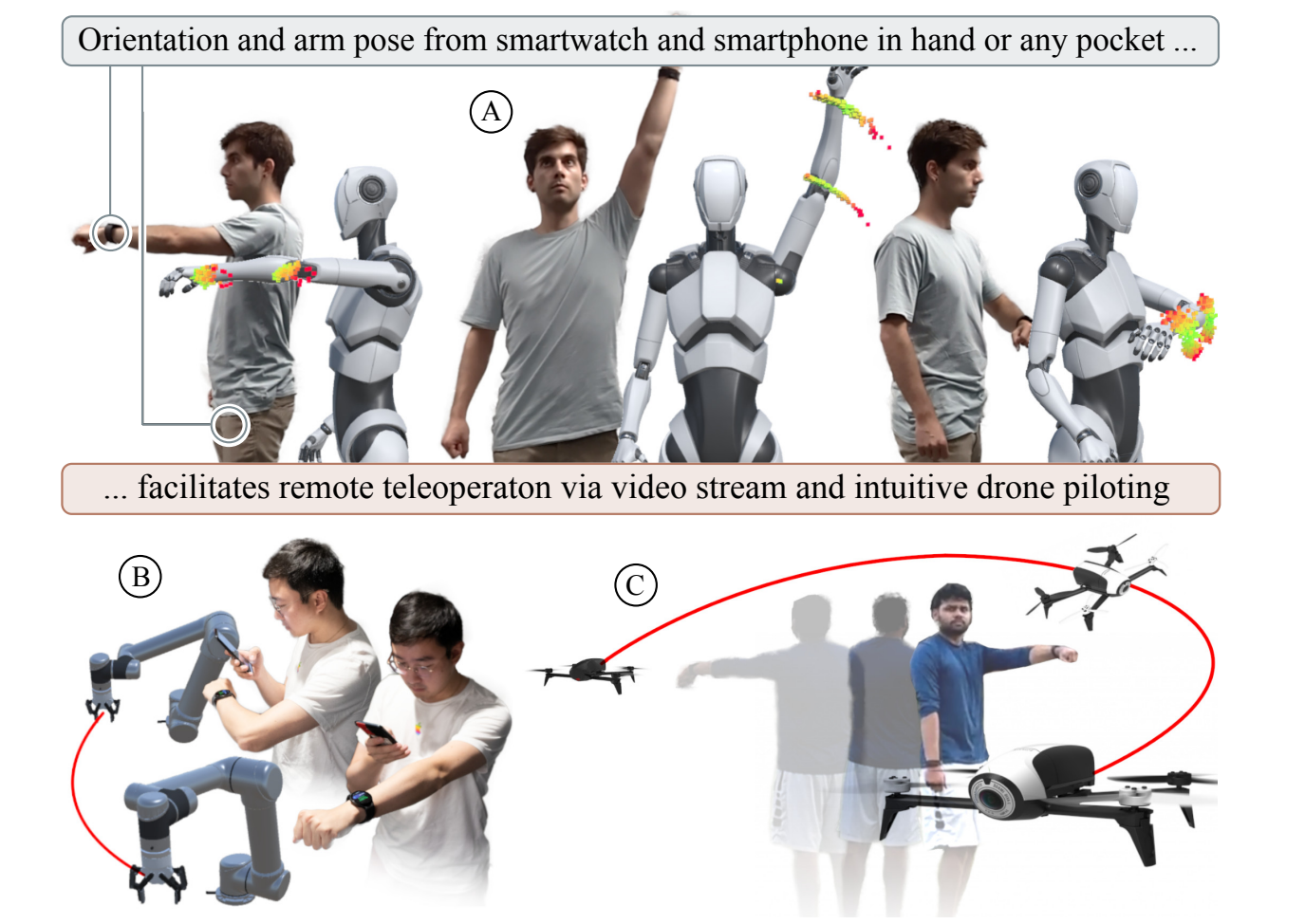 iRoCo: Intuitive Robot Control From Anywhere Using a Smartwatch2024 IEEE/RSJ International Conference on Robotics and Automation (ICRA), 2024
iRoCo: Intuitive Robot Control From Anywhere Using a Smartwatch2024 IEEE/RSJ International Conference on Robotics and Automation (ICRA), 2024 -
 Open X-Embodiment: Robotic Learning Datasets and RT-X Models2024 IEEE/RSJ International Conference on Robotics and Automation (ICRA), 2024
Open X-Embodiment: Robotic Learning Datasets and RT-X Models2024 IEEE/RSJ International Conference on Robotics and Automation (ICRA), 2024
2023
-
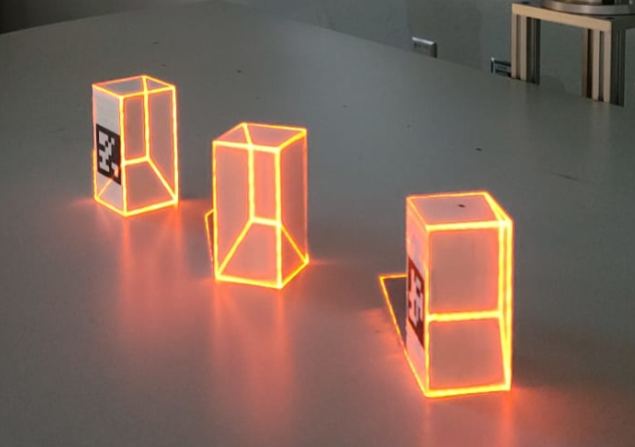
 Projecting Robot Intentions Through Visual Cues: Static vs. Dynamic SignalingIn 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2023
Projecting Robot Intentions Through Visual Cues: Static vs. Dynamic SignalingIn 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2023 -
 Anytime, Anywhere: Human Arm Pose from Smartwatch Data for Ubiquitous Robot Control and TeleoperationarXiv preprint arXiv:2306.13192, 2023
Anytime, Anywhere: Human Arm Pose from Smartwatch Data for Ubiquitous Robot Control and TeleoperationarXiv preprint arXiv:2306.13192, 2023 -
 Learning modular language-conditioned robot policies through attentionAutonomous Robots, 2023
Learning modular language-conditioned robot policies through attentionAutonomous Robots, 2023
2022
-
 Imitation Learning based Auto-Correction of Extrinsic Parameters for A Mixed-Reality SetuparXiv preprint arXiv:2212.08720, 2022
Imitation Learning based Auto-Correction of Extrinsic Parameters for A Mixed-Reality SetuparXiv preprint arXiv:2212.08720, 2022 -
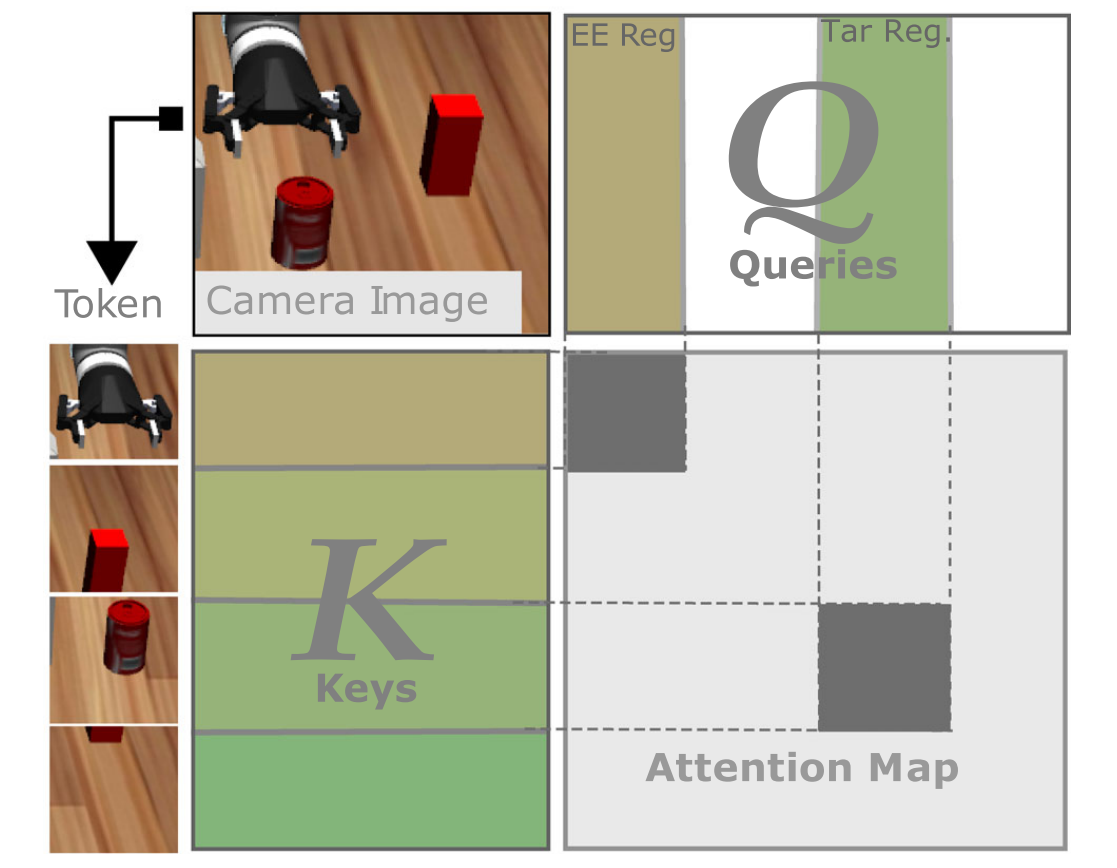 Modularity through Attention: Efficient Training and Transfer of Language-Conditioned Policies for Robot ManipulationarXiv preprint arXiv:2212.04573, 2022
Modularity through Attention: Efficient Training and Transfer of Language-Conditioned Policies for Robot ManipulationarXiv preprint arXiv:2212.04573, 2022 -
 When And Where Are You Going? A Mixed-Reality Framework for Human Robot CollaborationIn 5th International Workshop on Virtual, Augmented, and Mixed Reality for HRI , 2022
When And Where Are You Going? A Mixed-Reality Framework for Human Robot CollaborationIn 5th International Workshop on Virtual, Augmented, and Mixed Reality for HRI , 2022
2021
-
 Multimodal Data Fusion for Power-On-and-Go Robotic Systems in RetailarXiv preprint arXiv:2103.12241, 2021
Multimodal Data Fusion for Power-On-and-Go Robotic Systems in RetailarXiv preprint arXiv:2103.12241, 2021
2020
-
 Assistive relative pose estimation for on-orbit assembly using convolutional neural networksarXiv preprint arXiv:2001.10673, 2020
Assistive relative pose estimation for on-orbit assembly using convolutional neural networksarXiv preprint arXiv:2001.10673, 2020
2019
-
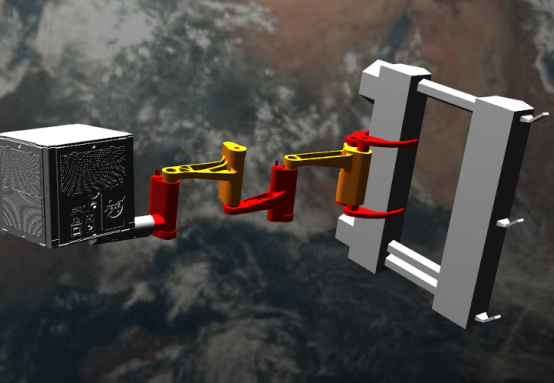 Robotic In-Space Assembly with Arm-Augmented Cubesats2019
Robotic In-Space Assembly with Arm-Augmented Cubesats2019
2017
-
 Modeling, design and control of low-cost differential-drive robotic ground vehicles: Part I—Single vehicle studyIn 2017 IEEE Conference on Control Technology and Applications (CCTA) , 2017
Modeling, design and control of low-cost differential-drive robotic ground vehicles: Part I—Single vehicle studyIn 2017 IEEE Conference on Control Technology and Applications (CCTA) , 2017 -
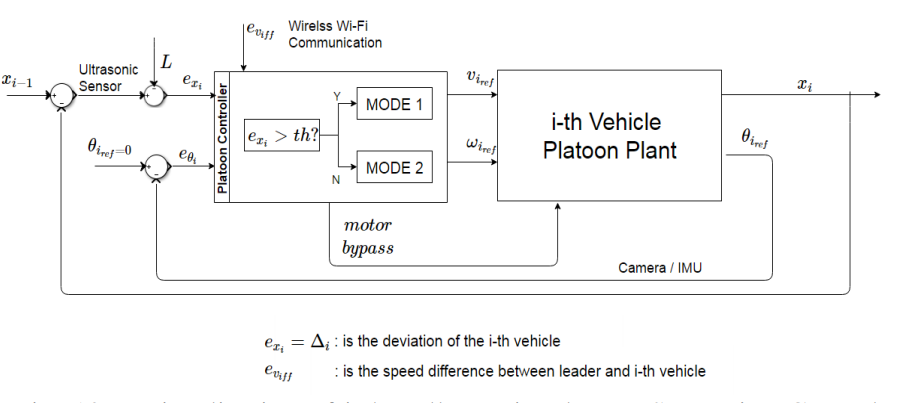 Modeling, design and control of low-cost differential-drive robotic ground vehicles: Part II—Multiple vehicle studyIn 2017 IEEE Conference on Control Technology and Applications (CCTA) , 2017
Modeling, design and control of low-cost differential-drive robotic ground vehicles: Part II—Multiple vehicle studyIn 2017 IEEE Conference on Control Technology and Applications (CCTA) , 2017